К элементам внутреннего ориентирования относятся. 20.Элементы внутреннего и внешнего ориентирования снимков.
Содержание
20.Элементы внутреннего и внешнего ориентирования снимков.
Эл-ты внутр и внеш ориентир снимка опред полож снимка относит объектива фотоаппарата и снимаемой местности или объекта.
Элементами внутреннего ориентирования называют величины, определяющие положение центра проекции относительно плоскости аэроснимка.
f,x0,y0 Главные точки снимка и фокусное расстояние всегда известны.

Эл-ты внеш ориентирования опред полож снимка относитснимаемой местности.
-3 линейных xs2, ys2,zs2 =Hр Геодезич координаты центра фотограф в выбраной системе шеодез координат.
-3 угловых(не известны)
α,t(ω),œ(каппа)
они определяют положение плоскости снимка относительно той же фотограмметрическои координатной системы.
Угол наклона снимка α , Угол поворота снимка œ,Угол между проекц гл вертикали и осью геодез t,Угол наклона снимка ω,тогда α продольный угол наклона, Дирекционный угол t
Формулы связи координат точек снимка и местности:
XAг=Xsг+(ZAг-Zsг)[a1(xa-xo)+a2(ya-yo)-a3f / c1(xa-xo)+c2(ya-yo)-c3f]
YAг=Ysг+( ZAг-Zsг) [b1(xa-xo)+b2(ya-yo)-b3f / c1(xa-xo)+c2(ya-yo)-c3f]
ai bi ci – направляющие косинусы кот явл тригоном функциями углового эл-та внеш ориентирования.
a1=Cosα*Cosœ-Sinα*Sinω*Sinœ
По этим формулам снач решаем обрат фотограм задачу , кот заключ в том, что по известным геод координатам опорных точек опред углов эл-ты внеш ориентир снимка αωœ. А затем решаем прямую фотограм задачу когда с пом углов эл-тов.
21.Системы координат применяемые в фотограмметрии.
1 Плоская прямоугольная система коорд снимка. mx,y=0.01мм
координатная система оху является внутренней и используется для определения положения точек аэроснимка
2 Фотограмметрич сист коорд — S центр фотографироввания, хф yф zф
выбирается так, чтобы зависимости между координатами соответственных точек снимка и местности имели наиболее простой вид. Ее начало совмещается с произвольной точкой (например, с точкой
местности А или с центром проекции), а координатные оси направ-ляются так, чтобы система оставалась прямоугольной и правой. Чаще всего ось ОХ совмещают с направлением маршрута. Положение точек в фотограмметрической системе определяется координатами X, У и Z.
3 Геодезическая сист коорд, oг xг yг zг
22.Зависимость между координатами точек объекта и координатами их изображений на снимках.
Пусть из точки S получен аэроснимок Р), на котором имеется изображение т точки местности М. Требуется установить зависимость между координатами точек т и М, полагая элементы

23.Масштаб наклонного снимка равнинной местности.
Ранее было установлено, что масштаб горизонтального снимка равнинной местности постоянен и определяется отношением фокусного расстояния съемочной камеры к высоте фотографирования. Наклонный снимок содержит перспективные искажения, и его масштаб уже не будет постоянным, что подтверждает и перспектива сетки квадратов .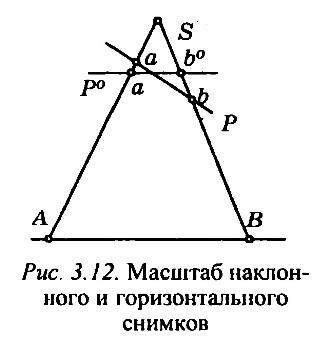
Следовательно, масштаб изображения следует определять как отношение бесконечно малых отрезков наклонного снимка и местности:
Масштаб по горизонталям (ф = 90°). Подкоренное выражение в знаменателе формулы равно k, а искомый масштаб:
Как видно, масштаб по любой горизонтали является величиной постоянной, что и подтверждает перспектива сетки квадратов .
Действуя аналогично, можно получить формулы для расчета масштаба по главной вертикали и горизонталям в основных точках.
После несложных преобразований, полагая, с достаточной для приближенных оценок точностью, что средний масштаб аэроснимка
определяется по формуле , получим:
Расчеты по этой формуле показывают, что при х = f и αс = 30′
относительное изменение масштаба составит около 1/30. С такой же точностью будут определены и длины измеренных на снимке линий. Следовательно, выполнять измерения по контактным аэроснимкам с использованием их среднего масштаба нужно весьма осторожно.
Элементы внутреннего ориентирования
Элементы геодезического ориентирования
Элементы внешнего ориентирования снимка
Расположенная в пределах продольного перекрытия снимков точка позволяет составить .4..
Различают 2 системы взаимного ориентирования снимков: базисную и .линейно-угловую
Различают 2 системы взаимного ориентирования снимков: линейно-угловую и …базисную
Разности продольных параллаксов соответственных точек на идеальной стереопаре являются функциями… рельефа местности
Разность абсцисс соответственных точек стереопары называют … продольным
Разность ординат соответственных точек стереопары называют … поперечным
Результатом взаимного ориентирования снимков является … модель
Связующие точки в пространственной фототриангуляции намечаются…в зоне тройного продольного перекрытия снимков
Соединение отдельных моделей в маршрутную модель фототриангуляции осущопорн точкам .
Соответствие между обозначениями символов в формуле К=(В0-ВФ)/ВФ и их сутью
К — дифференциальный порог
В0 — яркость объекта
Вф — яркость фона
Соответственными точками на стереопаре называются… изображения на левом и правом снимках одной и той же точки местности
Соответствие между цифровыми обозначениями основных частей планшетного сканера и их названиями:
Подвижная каретка 1
Направляющие 2
Механический привод 3
Ременная передача 4
Соответствие между цифровыми обозначениями основных частей роликого сканера и их названиями:
Ролики подачи бумаги
Лампа
Зеркало
Объектив
ПЗС — линейка
Оригинал
Составление топографического плана по снимкам осуществляют на:
СПР — 3
СЦ
СД — 3
Стереокомпаратор служит для… измерения координат и параллаксов точек в стереопаре
Соответствие между обозначениями элементов геодезического ориентирования модели и их названиями:
T масштабный множитель
Ѳ угол разворота модели
Поперечный угол наклона модели
Продольный угол наклона модели
Соответствие между отдельными процессами фототриангуляции и названиями групп точек и элементов ориентирования для их реализации:
Внешнее ориентирование — опорные точки
Внутреннее ориентирование – элементы внутреннего ориентирования
Взаимное ориентирование – ориентировочные точки
Построение маршрутной – связующие точки модели
Строгим способом пространственного фототриангулирования признан метод …связок
Следы соответственных лучей на левом и правом снимках стереопары соответственными
Соответствие между обозначениями и названиями элементов геодезического ориентирования стереопары
ξ — продольный угол наклона модели
η – поперечный угол наклона модели
θ—угол разворота модели
T – знаменатель масштаба модели
Соответствие между обозначениями фотограмметрических величин и их сутью:
X, y — плоские координаты точки
X’, Y’, Z’ – пространственные координаты точки
X, Y, Z – фотограмметрические координаты точки
Xг, Yг, Z г– геодезические координаты точки
Соответствие между обозначениями элементов взаимного ориентирования и их названиями
∆α – взаимный продольный угол наклона
τ—угол в плоскости левого снимка между осью Х1/ и следом главной базисной плоск
ν – угол наклона базиса относительно левого снимка
∆k – взаимный угол разворота снимков
Соответствие между обозначениями элементов взаимного ориентирования и их названиями:
α1’ – взаимный продольный угол наклона левого снимка
k1’ – взаимный угол разворота левого снимка в своей плоскости
ω2’ – взаимный поперечный угол наклона правого снимка
α2’ – взаимный продольный угол наклона правого снимка
χ2’ взаимный угол разворота правого снимка в своей плоскости
χ2’ — угол наклона разворота правого снимка в своей плоскости
Соответствие между элементами стереопары и их сутью …
Связка проектирующих лучей
Базисная плоскость
3условие компланарности
Продольный параллакс
Поперечный параллакс
Совокупность проектирующих лучей, проходящих через центр проекции
Плоскость, проходящая через базис фотографирования и любой проектирующий луч
Положение соответственных лучей в одной базисной плоскости
Разность абсцисс соответствующих точек